 Náčrtová rovina pro konstrukci kružnice |
|
Náčrtová rovina je nejpoužívanější pomůckou při modelování. Jedná se o libovolnou orientovanou rovinu xy, ve které kreslíme náčrty, vytváříme profily načrtnutých prvků nebo definujeme řezy. Náčrtové roviny mají všestranné použití jak při modelování součástí, tak při tvorbě ploch.
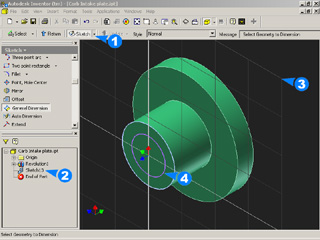
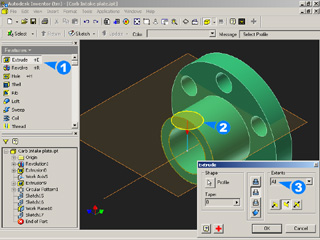
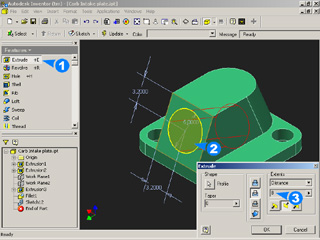 Z náčrtu je pomocí vysunutí je vytvořen válec |
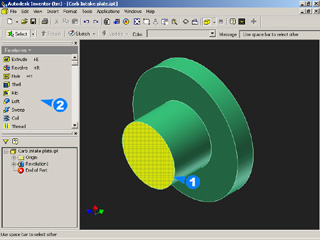
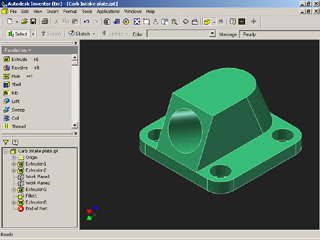 Odečtení válce pomocí množinových operací |
Správné pochopení jejich tvorby je velmi důležité pro zvládnutí libovolné aplikace pracující na základě parametrického a adaptivního modelování. Programy se doslova předhání ve funkcích zajišťujících co možná nejjednodušší definice požadované polohy náčrtových rovin.
Definice náčrtových rovinAutodesk Inventor umožňuje vytvoření náčrtové roviny pomocí dvou základních metod:
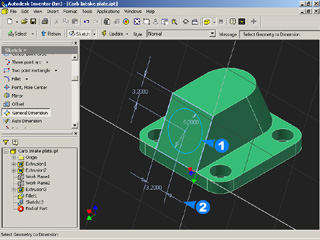
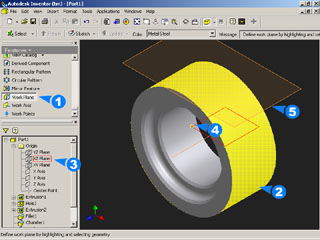
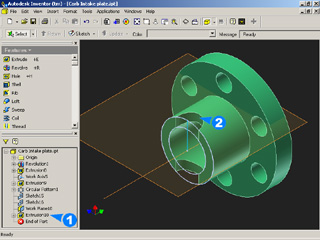
Odvozením z libovolné rovinné plochy – tato metoda je velmi efektivní a snadná. Náčrtová rovina je pomocí ikony pro aktualizaci náčrtové roviny odvozena z libovolné rovinné plochy na součásti. Metoda je velmi jednoduchá a efektivní vyžaduje ovšem přítomnost rovinných ploch na modelované součásti.
 Výběr roviny na součásti (nástroje pro modelování) |
 Aktivace nástrojů náčrt vytvoří náčrtovou rovinu |
Odvození z pracovní roviny – metoda využívá existence pracovních prvků, kterými jsou pracovní roviny. Jedná se o možnost obecného vytvoření náčrtové roviny, kterému se lze často vyhnout správným postupem vytváření modelu. Tato metoda je ale nenahraditelná především u součástí obecného tvaru a při modelování ploch.
Neexistuje obecné pravidlo, který způsob, kdy využít a je jen na uživateli systému, který způsob zvolí za efektivní. Samozřejmě i u začínajících uživatelů chvíli trvá, než získají určitý cit pro optimální volbu postupu definice náčrtové roviny.
Pracovní prvkyAplikace pro parametrické modelování obsahují pracovní prvky pro zjednodušení práce v prostoru. Snaží se jednoduchým způsobem vystihnout charakteristické body, osy a roviny vhodné pro popis geometrie a polohy modelu v prostoru.
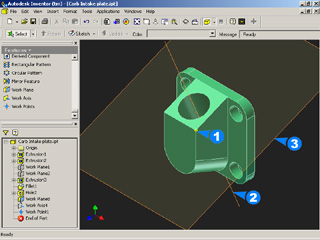 Pracovní prvky definované na modelu součásti |
|
V parametrickém modelování by klasický způsob transformace souřadného systému vytvořil velmi nepřehledný a složitý systém pro popis geometrie modelu součásti. Z tohoto důvodu prakticky využíváme pouze transformací pracovních rovin a os pomocí jednoduchých příkazů.
Globální pracovní prvkyAutodesk Inventor stejně jako řada jiných parametrických modelářů pracuje s dvěma typy souřadných systémů. První, Globální je pevný a jeho polohu nelze měnit. Druhý, Uživatelský má polohu závislou zcela na požadavcích uživatele.
 Vytvoření tečné roviny pomocí globálních |
|
Vhodnou kombinací pracovních prvků a pomocných konstrukčních čar lze často vyřešit i definice velmi složité geometrie. Pracovní prvky je nutné ovšem používat uvážlivě, pokud možno pouze tehdy, nelze-li pro definici nové geometrie součásti využít již existující roviny nebo plochy součásti.
 V čelní rovině vytvořte pomocnou konstrukci |
 Koncový bod úsečky tvoří bod definice roviny |
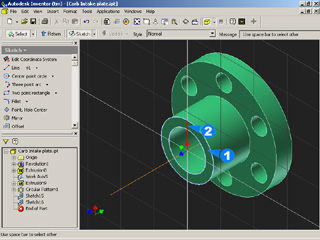
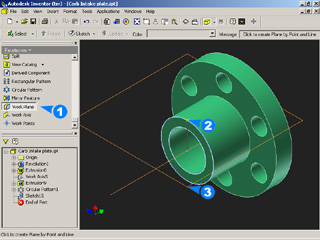
Na uvedeném příkladu je zobrazeno vytvoření náčrtové roviny, která je definována pomocí pracovní roviny tečné k vnější válcové ploše příruby. Jedná se o základní ukázku definice pracovní roviny pomocí velmi efektivních pomocných konstrukcí, které patří mezi efektivní postupy modelování.
Všechny vytvářené konstrukční body, osy a roviny jsou průběžně zobrazovány v objektovém prohlížeči. Lze tak přesně určit v jaké pozici se jednotlivé pracovní prvky nachází a s kterými částmi modelu jsou úzce provázány.
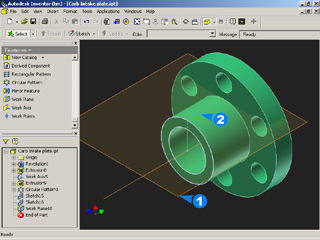 Potvďte myší definici polohy tečné roviny |
 Vyberte pracovní rovinu a aktivujte náčrt |
Pro zvýšení přehlednosti u složitých geometrií je možné pracovní prvky pomocí objektového prohlížeče skrýt. Velmi vhodné je také komentovat použití kritických pracovních prvků pomocí inženýrského zápisníku. Můžeme tak zabránit nechtěnému poškození modelu v případě úprav modelu a zdlouhavému odhalování následných chyb.
Při používání pracovních lze obecně doporučit jejich přednostní definici pomocí existující geometrie na modelovaných součástech. Využití hran a bodů je mnohdy výrazně jednodušší, než konstrukce pomocných objektů. Obdobné úsporné doporučení také platí pro množství pracovních prvků, které může výrazně snížit přehlednost v topologii tvorby modelu.
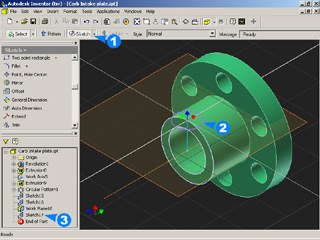
 V pracovní rovině vytvořte kružnici a vysuňte ji |
 Po odečtení vznikne v čelní ploše tvarová drážka |
Autodesk Inventor využívá pro vytváření pracovních prvků výhradně jednoznačného příkazu v nabídce příkazů pro modelování (features). Parametry se definují s přímým náhledem na polohu prvku pomocí levého tlačítka myši. V případě, že toto tlačítko stiskneme trvale můžeme určit ofsetovou vzdálenost od již existující roviny.